Project GenCo (2025)
GenCo: a Generate-Correct LVLM framework for adaptive peg-in-hole robotics.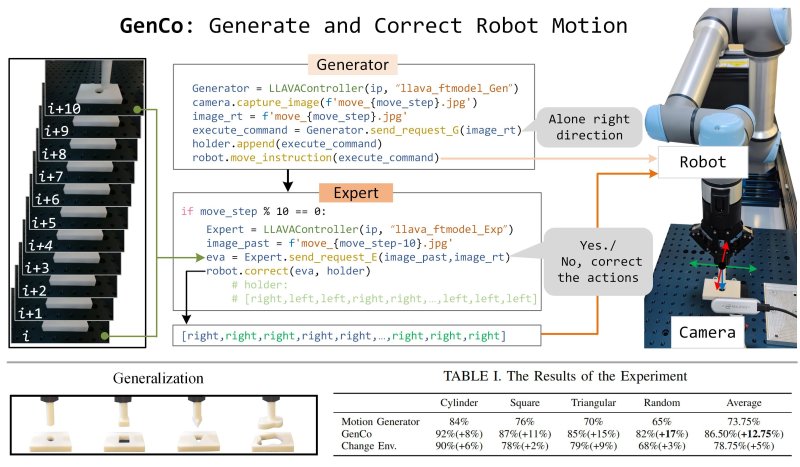

GenCo: a Generate-Correct LVLM framework for adaptive peg-in-hole robotics.
LIRA: Localization, Inspection, and Reasoning module for autonomous workflows.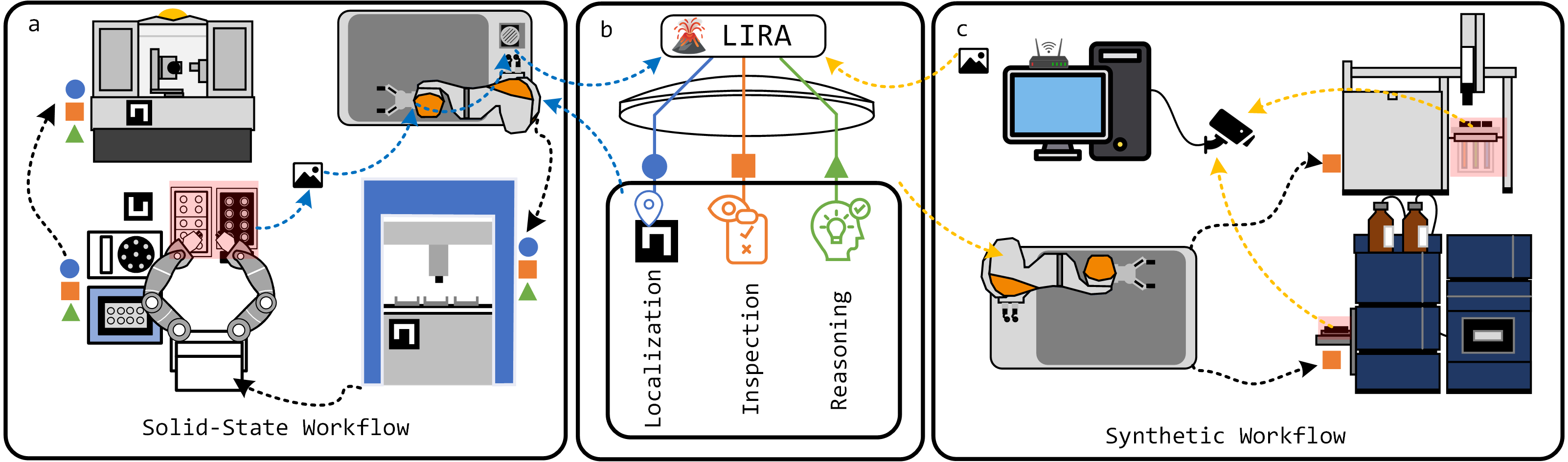
Multimodal behaviour trees for robotic lab task automation.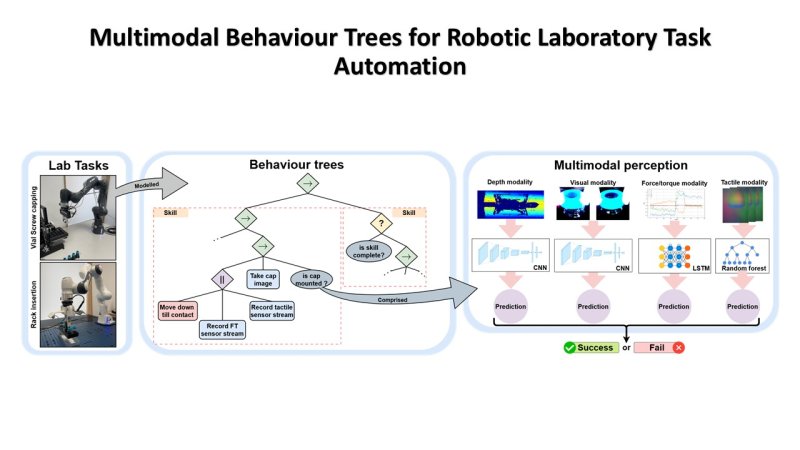
PREVENT: proactive risk evaluation and vigilant execution for mobile robotic chemists.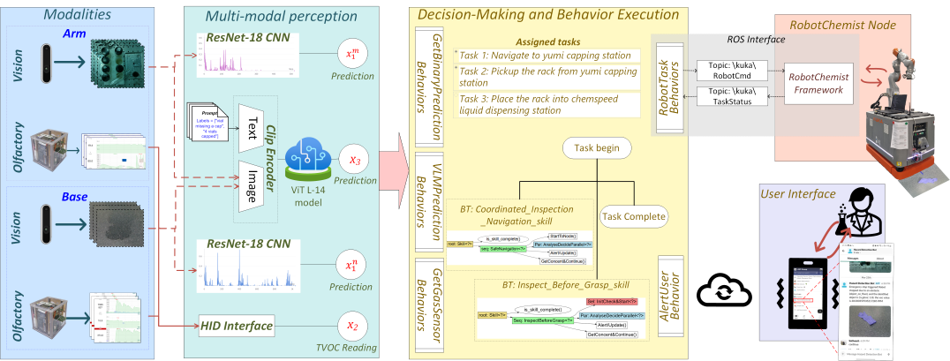
Short description of portfolio item number 1
Short description of portfolio item number 2
Published in IFToMM WC 2019. Mechanisms and Machine Science, Krakow, Poland, 2019
In this work, an artificial intelligence technique developed based on Markov Decision Process (MDP) is implemented for the task of multi-head based fixturing suitable for operations such as drilling, milling etc.
Recommended citation: Veeramani, Satheeshkumar, et al. "Multi-head path planning of SwarmItFIX agents: A Markov decision process approach." IFToMM World Congress on Mechanism and Machine Science. Cham: Springer International Publishing, 2019.
Download Paper
Published in Journal of Intelligent Manufacturing, 2020
In this work, two different novel planners are proposed which do path planning for the heads of the SwarmItFIX agents.
Recommended citation: Veeramani, Satheeshkumar, et al. "Artificial intelligence planners for multi-head path planning of SwarmItFIX agents." Journal of Intelligent Manufacturing 31.4 (2020): 815-832.
Download Paper
Published in 2020 IEEE 4th Conference on Information & Communication Technology (CICT), Chennai, India, 2020
In this work, the Markov Decision Process (MDP) path planning problem of SaD agent is solved using two Reinforcement Learning (RL) based dynamic programming methods viz Policy Iteration (PI), and Value Iteration (VI).
Recommended citation: Veeramani, Satheeshkumar, and Sreekumar Muthuswamy. "Reinforcement learning based path planning of the mobile agents with constrained locomotion for the material handling applications." 2020 IEEE 4th Conference on Information & Communication Technology (CICT). IEEE, 2020.
Download Paper
Published in Complex & Intelligent Systems, 2022
A novel offline coordination planner which follows the hierarchical based hybrid type decentralized planning strategy has been proposed. Motion of the serial manipulator and SwarmItFIX robots’ coordinated locomotion are divided into three sub-problems, viz, trajectory planning of serial manipulator, task planning of SwarmItFIX robots, and homogenous prioritized multi-robot path planning of SwarmItFIX robots.
Recommended citation: Veeramani, Satheeshkumar, and Sreekumar Muthuswamy. "Hybrid type multi-robot path planning of a serial manipulator and SwarmItFIX robots in sheet metal milling process." Complex & Intelligent Systems 8.4 (2022): 2937-2954.
Download Paper
Published in Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2022
A novel hierarchical planner is proposed, which employs Monte Carlo and SARSA TD based model-free Reinforcement Learning (RL) algorithms for the computation of locomotion sequences of head and base agents, respectively.
Recommended citation: Veeramani, Satheeshkumar, and Sreekumar Muthuswamy. "Reinforcement learning based path planning of multiple agents of SwarmItFIX robot for fixturing operation in sheetmetal milling process." Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture 236.12 (2022): 1667-1680.
Download Paper
Published in Procedia Computer Science, 2022
A heterogeneous multi-robot coordination methodology that has already been demonstrated to be successful in a milling process has been further enhanced here to make it suitable for a drilling process.
Recommended citation: Veeramani, Satheeshkumar, Sreekumar Muthuswamy, and Rossitza Setchi. "Coordination and path planning of a heterogeneous multi-robot system for sheet metal drilling." Procedia Computer Science 207 (2022): 2335-2344.
Download Paper
Published in IEEE Access, 2023
In this paper, we propose an affordance-based human-robot interaction (HRI) framework, aiming to reduce the action space size that would considerably impede the exploration efficiency of the agent.
Recommended citation: Munguia-Galeano, Francisco, Satheeshkumar Veeramani, Juan David Hernández, Qingmeng Wen, and Ze Ji. "Affordance-based human–robot interaction with reinforcement learning." IEEE Access 11 (2023): 31282-31292.
Download Paper
Published in Lab automation workshop at International Conference on Robotics and Automation 2024 (ICRA 2024), Yokohama, Japan., 2024
Published in Nature communications chemistry (Self-driving labs and automation software for chemistry and materials science), 2025
We introduce LIRA (Localization, Inspection, and Reasoning), which is an edge computing module that enhances robotic decision-making through vision-language models (VLMs).
Recommended citation: Zhengxue Zhou, Satheeshkumar Veeramani, Francisco Galeano, Hatem Fakhruldeen, and Andrew Cooper. "LIRA: Localization, Inspection, and Reasoning Module for Autonomous Workflows in Self-Driving Labs." (2025).
Download Paper
Published in Under Review in RAL, 2025
we propose navigation and manipulation skills based on a multimodal Behavior Tree (BT) approach that can be integrated into existing software architectures with minimal modifications. Our approach involves a hierarchical perception mechanism that exploits AI techniques (CNNs and VLMs) and sensory feedback through Dexterous Vision and Navigational Vision cameras and an IoT gas sensor module for execution-related decision-making.
Recommended citation: Satheeshkumar Veeramani, Zhengxue Zhou, Francisco Munguia-Galeano, Hatem Fakhruldeen, Thomas Roddelkopf, Mohammed Faeik Ruzaij Al-Okby, Kerstin Thurow, Andrew Ian Cooper" (2025).
Download Paper
Published in TAROS 2025, York, England, UK, 2025
This paper introduces an open-source capping machine suitable for compact spaces, which also integrates a vision system that recognises capping failure.
Recommended citation: Munguia-Galeano, Francisco, Louis Longley, Satheeshkumar Veeramani, Zhengxue Zhou, Rob Clowes, Hatem Fakhruldeen, and Andrew I. Cooper. "An Open-source Capping Machine Suitable for Confined Spaces." arXiv preprint arXiv:2506.03743 (2025).
Download Paper
Published in International Conference on Robotics and Automation 2025 (ICRA 2025), Atlanta, USA, 2025
Currently, robots can perform these tasks faster than chemists, but how reliable are they? Improper capping could result in human exposure to toxic chemicals which could be fatal.
Recommended citation: H. Fakhruldeen et al., "Multimodal Behaviour Trees for Robotic Laboratory Task Automation," 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 2025, pp. 15872-15878, doi: 10.1109/ICRA55743.2025.11128408.
Download Paper
Published in International Conference on Robotics and Automation 2025 (ICRA 2025), Atlanta, USA, 2025
we propose GenCo, a Generate-Correct framework designed to automate a peg-in-hole task using a UR5e robot. This framework integrates an LVLM-based motion generator and motion expert, working collaboratively to refine and correct actions during robotic task execution.
Recommended citation: Z. Zhou, S. Veeramani, H. Fakhruldeen, S. Uyanik and A. I. Cooper, "GenCo: A Dual VLM Generate-Correct Framework for Adaptive Peg-in-Hole Robotics," 2025 IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 2025, pp. 16744-16751, doi: 10.1109/ICRA55743.2025.11128409.
Download Paper
Published in Digital Discovery (Under Review), 2025
The Chemist Eye system integrates RGB, depth and infrared stations with a vision-language model (VLM) to monitor PPE compliance, detect fires and medical emergencies, and drive robot decision-making in self-driving laboratories. Evaluation on real SDL data reports ~97% hazard spotting and ~95% decision-making accuracy.
Recommended citation: Munguia-Galeano, F., Zhou, Z., Veeramani, S., Fakhruldeen, H., Longley, L., Clowes, R., & Cooper, A. I. (2025). Chemist Eye: A Visual Language Model-Powered System for Safety Monitoring and Robot Decision-Making in Self-Driving Laboratories. arXiv:2508.05148.
Download Paper
Published in Nature Computational Science, 2026
MATTERIX introduces a digital-twin framework for robotics-assisted chemistry laboratory automation, integrating simulation, experiment and data-driven models to accelerate and robustly manage automated workflows.
Recommended citation: Darvish, K., Sohal, A., Mandal, A., Fakhruldeen, H., Radulov, N., Zhou, Z., Veeramani, S., ... & Cooper, A. I. (2025). MATTERIX: toward a digital twin for robotics-assisted chemistry laboratory automation. Nature Computational Science 6, 67–82. doi:10.1038/s43588-025-00924-4
Download Paper
Published in Digital Discovery, 2026
We have built an automated process chemistry platform that tackles late-stage process development. The modular workflow integrates both industry-standard tools and bespoke devices to enable process scale synthesis, work-up, and analysis. A multitasking mobile robot works between an automated synthesis reactor and an ultra-high-performance liquid chromatography-mass spectrometer (UHPLC-MS) for product analysis, cleaning the reactor between runs.
Recommended citation: Brass, E. J., Veeramani, S., Zhou, Z., Fakhruldeen, H., Manzano, J. S., Clowes, R., ... & Cooper, A. I. (2026). A mobile robotic process chemist. Digital Discovery.
Download Paper
Published in The ACM/IEEE International Conference on Human-Robot Interaction (HRI '26), Edinburgh, Scotland, UK, 2026
we present an initial study of an embodied, AI-driven perception method that facilitates proactive human-robot interaction in shared-access scenarios. Our method features a hierarchical human intention prediction model that allows the robot to distinguish between preparatory actions (waiting) and transient interactions (accessing the instrument).
Recommended citation: Satheeshkumar Veeramani, Anna Kisil, Abigail Bentley, Hatem Fakhruldeen, Gabriella Pizzuto, and Andrew I. Cooper. 2026. Human-Aware Robot Behaviour in Self-Driving Labs. In Companion Proceedings of the 21st ACM/IEEE International Conference on Human-Robot Interaction (HRI Companion '26). Association for Computing Machinery, New York, NY, USA, 292–296.
Download Paper
Published:
Delivered a talk on integrating robots into chemistry workflows. Techniques and tools. Link
Published:
Delivered a talk on integrating robots into chemistry workflows. Techniques and tools. Link
Published:
Published:
Delivered a talk on integrating robots into chemistry workflows. Techniques and tools. Link
Published:
Delivered a research talk on “AI-driven perception modules for Mobile-Robotic Chemists to detect anomalies in Self-Driving Labs”, during the annual meeting of EPSRC Program Grant “Digital Navigation of Chemical Space for Function”.
Published:
Delivered a guest lecture to MSc students at the University of Liverpool on “Safe Robotic Task Execution in Self-Driving Laboratories”. The lecture covered safety considerations for mobile and manipulation robots in automated labs, perception-driven hazard detection, risk-aware planning, and strategies for fault detection, recovery, and human-robot coordination in shared lab spaces.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.